
Tabla de contenidos
En el artículo anterior de esta sección se comparaban los resultados en colisión frontal de dos automóviles, uno clásico y otro actual, para valorar los avances en seguridad pasiva secundaria (reduce en lo posible los daños físicos durante un accidente).
En este artículo se explican algunas de las aportaciones en seguridad activa o primaria (trata de evitar el accidente), que se van incorporando en los automóviles progresivamente, algunas con bastante difusión incluso en todas las gamas de modelos actualmente.
Estos sistemas pueden ser generalmente desactivados por el conductor.
Las denominaciones que utilizamos son didácticas para indicar sus funciones, las marcas tienen sus propias identificaciones comerciales.
Complementos de seguridad activa
Control de ángulos muertos
El retrovisor interior se incorporó enseguida al automóvil, pero los exteriores tardaron bastante más en llegar siendo accesorios que se montaban a demanda del conductor.
Después vino de serie el retrovisor exterior del lado del conductor y años más tarde el del lado opuesto.
Con estos tres retrovisores se dispone de una buena visión de lo que sucede detrás del coche.
No obstante, en el lado de conductor hay un pequeño ángulo muerto que no permite ver lo que está sucediendo en esta determinada zona, suele coincidir con la presencia de un objeto (otro vehículo generalmente) que está más o menos paralelo a nuestro automóvil y bastante cerca, por lo que una maniobra hacia ese lado puede acabar en accidente.
Hay retrovisores del lado del conductor con espejos de dos geometrías, que reducen en lo posible esta zona sin visión o ángulo muerto con más o menos distorsión de la imagen.
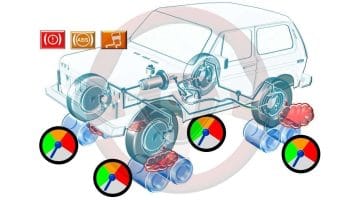
Para saber lo que pasa detrás del coche por el lado del conductor se ha incorporado una tecnología específica, que denominamos “control de ángulos muertos”, los sistemas más utilizados se representan en la imagen.

- Con cámara de ángulo muerto (azul); una cámara de vídeo en el retrovisor exterior del lado del conductor abarca un amplio ángulo de visión, incluido el ángulo muerto que no se ve en el retrovisor, cuya zona de visión se resalta en amarillo. Cuando el conductor se va a desviar hacia ese lado un sistema de información le alerta de la presencia de algo en la zona por la que quiere ir, para que actúe y evite el posible accidente. La información puede ser visual y complementarla con aviso acústico, incluso con la imagen real de lo que hay en esa zona, la cámara lo está viendo.
- Con sensores de ángulo muerto (rojo); en lugar de la cámara de vídeo en el retrovisor se disponen en los lados del automóvil, bajo las puertas, unos sensores de proximidad, similares a los que se utilizan para ayudar al aparcamiento. Cuando se aproxima algún vehículo por esa zona es detectado. Si el conductor gira hacia ese lado, porque el campo de visión en el retrovisor no lo refleja o va distraído, el sistema le da al información, visual (¿y acústica?), pero no en pantalla al no haber imagen sino detección de la presencia.
Según la tecnología empleada el sistema puede ser activo actuando sobre la dirección para evitar la colisión si el conductor no reacciona a tiempo.
Control de salida de carril
Circulando se ha de seguir por el carril delimitado por las líneas longitudinales de la carretera.
Cuando se va a cambiar de carril se pone el intermitente y se tienen en cuenta las precauciones habituales.
Es posible que por distracción o somnolencia del conductor el automóvil se desvíe de la trayectoria, con el riesgo que supone.
Para vitar que se salga el automóvil del carril se incorpora un sistema que lo detecta, se basa en colocar en el frontal del automóvil dos cámaras o detectores que “ven” las líneas longitudinales que señalan el carril.
Circulando entre las líneas del carril las cámaras lo “ven” no aportando información.
Si el automóvil se desvía y alguna rueda delantera va a pisar una de las líneas que delimitan el carril, sin haber puesto el intermitente, informa al conductor para llamar su atención, hay diferentes formas de hacerlo pero han de ser intensas pues puede haber sido por somnolencia y exigir una rápida corrección; señal visual, acústica y vibración del asiento por uno de los lados o del volante hacia el sentido de corrección, se puede añadir un giro activo del sistema en la dirección para recuperar la trayectoria correcta.
Con niebla o visibilidad reducida el sistema puede no funcionar.

Sensor de lluvia
Cuando llueve se ha de poner en marcha el limpiaparabrisas a la velocidad más adecuada, y pararlo cuando ya no llueve.
Estas acciones requieren atención del conductor en condiciones de visibilidad y adherencia de los neumáticos reducidas.
Hay casos en que se circula con el limpiaparabrisas en funcionamiento cuando ya no es necesario, con mucho desgaste de las escobillas y bastante consumo eléctrico al ser muy elevada la fricción en seco.
Se detecta que llueve montando un sensor de reflexión en la parte superior interna del parabrisas, con las informaciones obtenidas “sabe” si llueve y la cantidad, haciendo que se auto conecte el limpiaparabrisas adaptando la velocidad y frecuencia de actuación a la intensidad de la lluvia, parándolo cuando deja de llover.

Sensor de luz
La iluminación del automóvil es para ver y ser visto.
En muchos casos el conductor enciende las luces cuando considera que no ve lo suficiente y no siempre valora como se ve a nuestro automóvil.
Esta subjetividad hace que en situaciones de media visibilidad haya disparidad en la iluminación con la que circulan los automóviles.
La solución la aporta el sensor de luz, situado en la parte superior del interior del parabrisas, próximo al sensor de lluvia; detecta la luz ambiental encendiendo los faros de cruce (“cortas”) y pilotos de posición cuando la luz exterior baja de intensidad, apagando las luces si aumenta la luz exterior.
Regulador de velocidad activo
Viajando por autopista o carreteras con más de un carril cuando no hay mucho tráfico, tener que mantener la velocidad de crucero es un trabajo para el conductor que requiere atención.
Hace bastantes años se han incorporado sistemas de control automático de velocidad de crucero; en las condiciones de circulación citadas el conductor cuenta con un sistema que permite mantener la velocidad seleccionada sin tener que pisar el acelerador (120 km/h en el automóvil de la imagen superior), la velocidad se adapta en subidas y bajadas si es factible para el automóvil, en caso de no poder subir la pendiente el sistema se desconecta (con caja de cambios manual), así como al pisar el pedal de embrague o de freno.
Aunque haya poco tráfico, si circula un vehículo más lento delante y viene otro detrás por el carril izquierdo hay que frenar hasta poder adelantarle y actuar para recuperar el control de crucero automático.
Para mantener el sistema conectado en estas situaciones se amplia el control de crucero automático con una función activa; con sensores delante del automóvil (radar, cámaras, láser,…) se detecta la presencia de un vehículo más lento delante, en la imagen inferior circulando a 90 km/h, y se adapta automáticamente la velocidad a la de este.
Al adelantarle y detectar los sensores vía libre delante se recupera la velocidad de crucero seleccionada.
El conductor puede elegir diferentes distancias de marcha con relación al automóvil más lento y otras opciones para adaptar a su gusto el control de velocidad de crucero automático activo.

Estas tecnologías, y otras muchas más, son la base para el automóvil de conducción autónoma.
Artículos relacionados
- Módulo 1 – ADAS Ayudas a la conducción
- Módulo 3 – ADAS de iluminación y limpiaparabrisas
- Módulo 5 – ADAS de visualización y detección
- Módulo 7.2 – ADAS de asistencia predictiva